
JPL设计的Mars2020 Rover Mission[1] 是NASA的下一个火星探索项目,计划于2020年登陆火星。此次飞行任务的一些目标是检查过去的生命迹象、帮助为载人火星任务做准备、收集火星土壤样品带回地球。
探测车设计与它的前任Curiosity类似,但加入了很多更具技术含量的创新。让我们来看看Mars2020 Rover不同的主体部件,以及如何驱动这些主体部件。
第1个部件:“颈部和头”
外观及功能像Mars2020 Rover颈部和头的部件被称之为“Pancam Mast Assembly”。这个桅杆可以使探测车像人类一样观察火星环境。它的高度为5英尺,它的摄像机可达6英尺高的人的眼睛视角范围。在飞行任务开始时,探测车在行进过程中,Pancam Mast Assembly平放在探测车的顶部。准备使用时,桅杆升起,在完成任务期间保持升起状态。
内部结构
通过什么驱动探测车的桅杆?为了驱动这样高度的仪器,同时允许它折叠和升起,探测车将使用加长长度的挠性线缆。想想一下,拿一块典型的电路板,使它可拉伸、可弯曲,并使其足够先进可靠,可以抵抗火星的表面。Mars2020可扩展长度的挠性电路再次由Pioneer Circuits制造,该公司为所有之前的探测车——Curiosity、Spirit和Pathfinder制造了可扩展长度的挠性电路板。

图2:Curiosity的自拍照,一根棕色的弯曲电缆缠绕至桅杆。Mars2020 Rover将有类似的设计。
第2个部件:“眼睛”
准确地说,Mars2020 Rover共有23个眼睛。它可支持23个不同的摄像机:9个工程摄像机、7个科学摄像机、7个入口、下降和着陆摄像机。探测车的摄像使它能够记录从来没有见过的探测车降落镜头、导航和避免危险、拍摄三维图像、使用激光抓拍特写镜头、分析汽化的岩石材料,以及使用X射线来识别化学元素。
内部结构
通过什么驱动探测车的摄相机呢?先来研究工程摄像机,它可为探测车导航、避免危险、并拍摄样品图像。这些摄相机是通过刚挠性电路板驱动的。刚挠性电路板非常先进,它既具有刚性板的功率和耐久性,同时又具有挠性板的灵活性和可靠性。Mars2020工程摄像机内部的电路板具有极强的技术和编程难度,为了放入摄相机内部并驱动高级摄相机,它的尺寸必须足够小且功率要足够大。
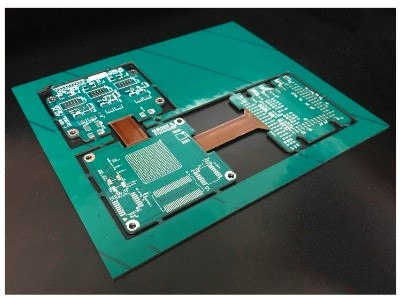
图3:由Pioneer Circuits为Mars2020 Rover设计的工程摄相机刚挠性电路板。最终的板子要从去除四周的绿色框架,并能够弯曲折叠成所需的形状。
第2个部件:“手臂和手”
The Mars2020将能够从火星环境中收集岩石和土壤样品。7英尺的手臂有肩膀、肘部和其他关节,能够像人一样具有灵活性,可拿住目标。在未来的NASA飞行任务中,该手臂能够从火星表面拾起和放下样品,并可将样品放到探测车中,带回地球。
内部结构
由于Mars2020机器人手臂具有Force Torque Sensor (FTS)传感器,所以它具备可像人一样移动的特性。该传感器由Motiv Space Systems团队专为探测车设计制造。Force Torque Sensor (FTS)传感器可探测到施加至机器人手臂上的不同力,并反馈给机器人,这样它就能实施运动了。FTS系统使手臂组件成为集成入火星探测车的最复杂的组件。
总结
新Mars2020探测车,以及所有它的前任Spirit、Opportunity和Curiosity上的所有新技术模块都要求采用高技术刚挠性及长度可扩展的挠性电路技术,以提供动力和互连。尽管探测车技术将会继续越来越先进,但为他们提供动力的部件仍需要保持可靠,并能够将很多电能装入小的挠性电路中。
References
1. Mars2020 Rover Mission
2. NASA Mars Exploration Program
Thy-An Tran是Pioneer Circuits Inc公司的市场策略师。
